Sleepy Guide: How To Install ROS 2 on Windows 10

Hey. Yo. Didn’t sleep much? Rushing yet another project? Same here. So let’s keep things simple for both of us.
So you want to install ROS 2 Humble on Windows? Great.
Copy & Paste. That’s all.
Just copy & paste. No thinking needed. Just basic cognitive functions here.
Setup
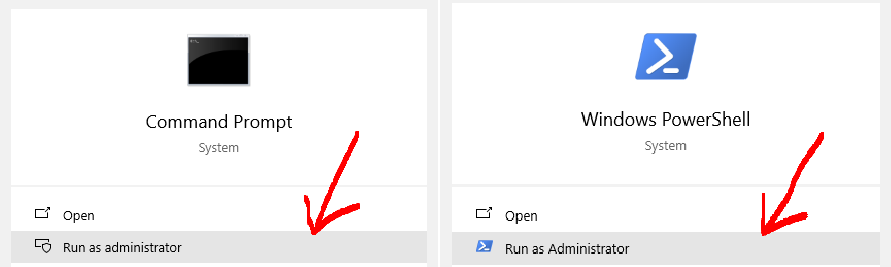
Open up a [ Command Prompt ] & [ PowerShell ] with admin rights.
1. [ Command Prompt ] - Install wget
choco install -y wget
2. [ PowerShell ] - Install Chocolatey:
Set-ExecutionPolicy Bypass -Scope Process -Force; [System.Net.ServicePointManager]::SecurityProtocol = [System.Net.ServicePointManager]::SecurityProtocol -bor 3072; iex ((New-Object System.Net.WebClient).DownloadString('https://community.chocolatey.org/install.ps1'))
3. [ Command Prompt ] - Install Python
choco install -y python --version 3.8.3
4. [ Command Prompt ] - Install Visual C++ Redistributables:
choco install -y vcredist2013 vcredist140
5. [ Command Prompt ] - Install OpenSSL:
cd %USERPROFILE%/Downloads
wget https://slproweb.com/download/Win64OpenSSL-1_1_1w.msi
setx /m OPENSSL_CONF "C:\Program Files\OpenSSL-Win64\bin\openssl.cfg"
setx /m PATH "%PATH%;C:\Program Files\OpenSSL-Win64\bin\"
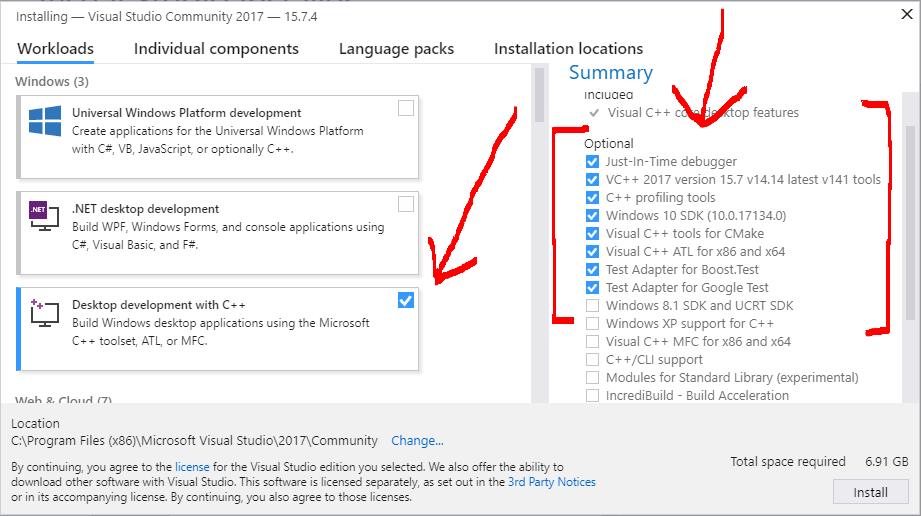
6. [ Command Prompt ] - Install Visual Studio 2019:
choco install -y visualstudio2019community
7. ⚠️ Restart your PC to refresh environment variables before continuing.
8. [ Command Prompt ] - Install OpenCV:
cd %USERPROFILE%/Downloads
cd C:\
mkdir opencv
cd %USERPROFILE%/Downloads
wget https://github.com/ros2/ros2/releases/download/opencv-archives/opencv-3.4.6-vc16.VS2019.zip
tar xvfz opencv-3.4.6-vc16.VS2019.zip -C C:\opencv
setx /m OpenCV_DIR C:\opencv
setx /m PATH "%PATH%;C:\opencv\x64\vc16\bin"
9. [ Command Prompt ] - Install other dependencies:
choco install -y cmake
cd %USERPROFILE%/Downloads
mkdir repositories
cd repositories
wget https://github.com/ros2/choco-packages/releases/download/2022-03-15/asio.1.12.1.nupkg
wget https://github.com/ros2/choco-packages/releases/download/2022-03-15/bullet.3.17.nupkg
wget https://github.com/ros2/choco-packages/releases/download/2022-03-15/cunit.2.1.3.nupkg
wget https://github.com/ros2/choco-packages/releases/download/2022-03-15/eigen.3.3.4.nupkg
wget https://github.com/ros2/choco-packages/releases/download/2022-03-15/tinyxml-usestl.2.6.2.nupkg
wget https://github.com/ros2/choco-packages/releases/download/2022-03-15/tinyxml2.6.0.0.nupkg
cd ..
choco install -y -s repositories asio cunit eigen tinyxml-usestl tinyxml2 bullet
python -m pip install -U pip setuptools==59.6.0
python -m pip install -U catkin_pkg cryptography empy importlib-metadata lark==1.1.1 lxml matplotlib netifaces numpy opencv-python PyQt5 pillow psutil pycairo pydot pyparsing==2.4.7 pyyaml rosdistro
10. [ Command Prompt ] - Install Qt5:
cd %USERPROFILE%/Downloads
wget https://download.qt.io/archive/qt/5.12/5.12.12/qt-opensource-windows-x86-5.12.12.exe
call qt-opensource-windows-x86-5.12.12.exe
> ⚠️
> You will need to sign up for a login account here when installing. This is due to
> a controversial policy change in 2020. Check out [here](https://www.qt.io/blog/qt-offering-changes-2020) for more details.
setx /m Qt5_DIR C:\Qt\Qt5.12.12\5.12.12\msvc2017_64
setx /m QT_QPA_PLATFORM_PLUGIN_PATH C:\Qt\Qt5.12.12\5.12.12\msvc2017_64\plugins\platforms
11. [ Command Prompt ] - Install GraphViz:
choco install -y graphviz
12. [ Command Prompt ] - Install ROS 2:
cd %USERPROFILE%/Downloads
wget https://github.com/ros2/ros2/releases/download/release-humble-20240222/ros2-humble-20240222-windows-release-amd64.zip
mkdir dev\ros2_humble
cd %USERPROFILE%/Downloads
cd C:\
tar xvfz ros2-humble-20240222-windows-release-amd64.zip -C C:\dev\ros2_humble
Verify
1. [ Command Prompt ] - Source the ROS 2 setup file.
call C:\dev\ros2_humble\ros2-windows\local_setup.bat
2. [ Command Prompt ] - Run talker ROS 2 node:
ros2 run demo_nodes_cpp talker
3. [ Command Prompt ] - Run listener ROS 2 node in another terminal:
ros2 run demo_nodes_py listener
4. It should look similar to what is shown below:
[INFO] [1711201903.525939200] [talker]: Publishing: 'Hello World: 1'
[INFO] [1711201904.531960900] [talker]: Publishing: 'Hello World: 2'
[INFO] [1711201905.538109400] [talker]: Publishing: 'Hello World: 3'
[INFO] [1711201906.528078800] [talker]: Publishing: 'Hello World: 4'
[INFO] [1711201907.534121300] [talker]: Publishing: 'Hello World: 5'
[INFO] [1711201908.524656700] [talker]: Publishing: 'Hello World: 6'
[INFO] [1711201909.531361100] [talker]: Publishing: 'Hello World: 7'
[INFO] [1711201910.537687100] [talker]: Publishing: 'Hello World: 8'
[INFO] [1711201905.595844300] [listener]: I heard: [Hello World: 3]
[INFO] [1711201906.530543000] [listener]: I heard: [Hello World: 4]
[INFO] [1711201907.536591800] [listener]: I heard: [Hello World: 5]
[INFO] [1711201908.527087400] [listener]: I heard: [Hello World: 6]
[INFO] [1711201909.533571700] [listener]: I heard: [Hello World: 7]
[INFO] [1711201910.540949700] [listener]: I heard: [Hello World: 8]
Uninstall 🔴
Run the command below to undo everything that is installed following this article:
rmdir /s /q C:\dev\ros2_humble
rmdir /s /q C:\opencv
choco uninstall -y wget python vcredist2013 vcredist140 cmake graphviz asio cunit eigen tinyxml-usestl tinyxml2 bullet -x
Remove the system environment variables that were set before:
Qt5_DIR
QT_QPA_PLATFORM_PLUGIN_PATH
Remove the following paths from PATH:
C:\opencv\x64\vc16\bin
C:\Program Files\OpenSSL-Win64\bin\
Run the command below to remove the installed python packages:
python -m pip uninstall -U catkin_pkg cryptography empy importlib-metadata lark==1.1.1 lxml matplotlib netifaces numpy opencv-python PyQt5 pillow psutil pycairo pydot pyparsing==2.4.7 pyyaml rosdistro
Delete all files downloaded from wget:
cd %USERPROFILE%/Downloads
del Win64OpenSSL-1_1_1w.msi
del opencv-3.4.6-vc16.VS2019.zip
rmdir /s /q repositories
del qt-opensource-windows-x86-5.12.12.exe